RTK (Real-Time Kinematic) e PPP (Precise Point Positioning) são duas tecnologias que ajudam a conseguir coordenadas precisas por meio de sistema de satélites, GNSS. Esses métodos são muito utilizados em áreas que precisam de medições exatas e ambos entregam ótimos resultados, mas cada um funciona de forma específica.
RTK
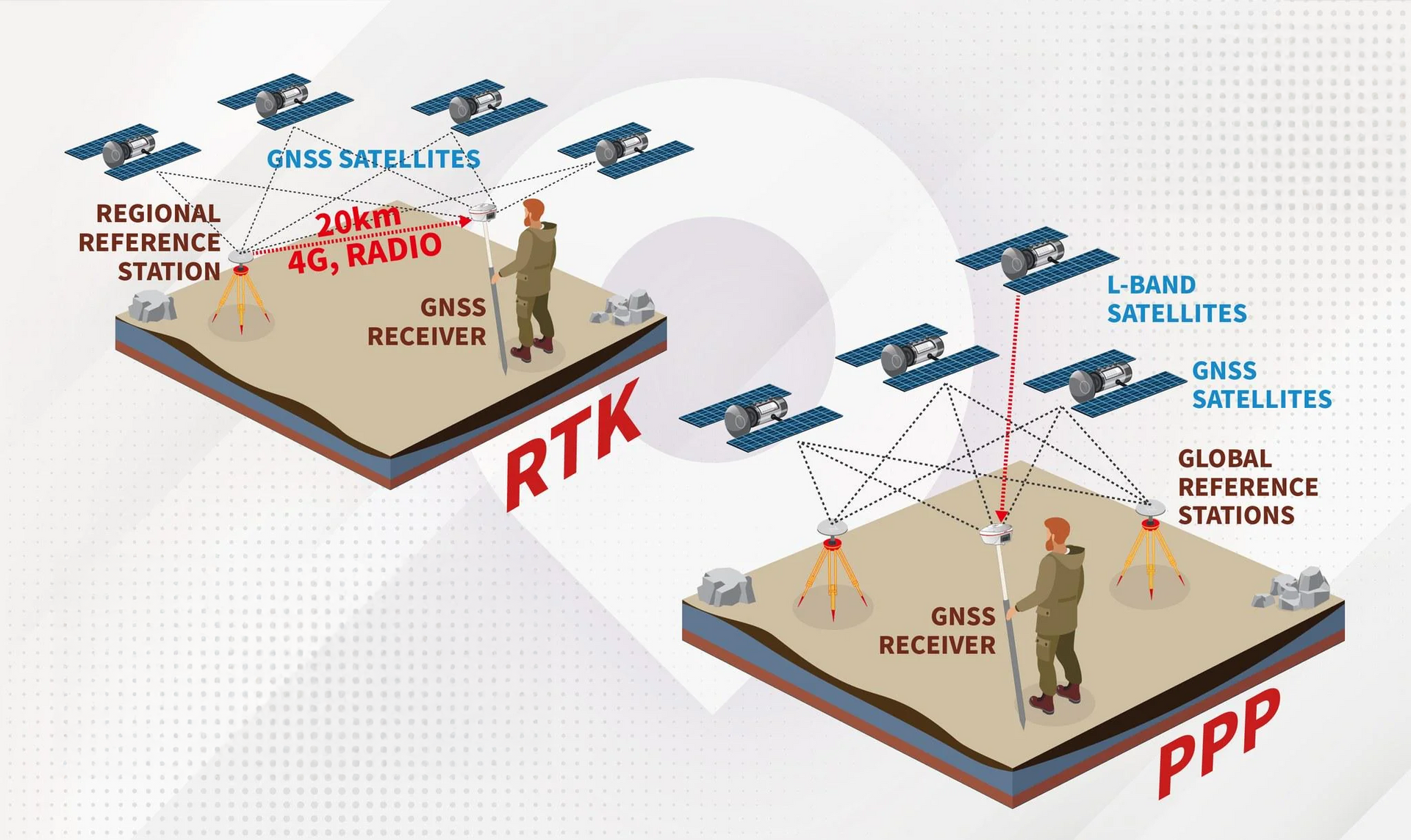
No posicionamento RTK, é necessário uma estação móvel (ou rover) para obter dados de observação simultâneos da estação base ou de uma estação de referência CORS (Continuous Operating Reference Station). Essa estação base ajuda a corrigir os erros de sinal que os satélites enviam para a estação móvel, que é o aparelho que vai fazer as medições no campo.
A estação base envia essas correções em tempo real, por rádio ou internet, possibilitando o rover a obter coordenadas em tempo real de alta precisão. Contudo, a tecnologia RTK depende de uma boa conexão com a base e da proximidade entre o rover e a estação. Se o rover estiver muito longe ou fora do alcance de comunicação, o RTK perde eficiência.
PPP
O posicionamento PPP, não precisa de uma estação base por perto. Ele alcança alta precisão utilizando apenas um dispositivo GNSS, superando a limitação de alcance operacional e aumentando a flexibilidade de uso do equipamento. No caso, os satélites enviam informações de correção para o aparelho, que processa e elimina os erros sozinho.
O PPP possui uma desvantagem, pois precisa de um tempo de convergência para atingir os resultados precisos do PPP-AR (Precise Point Positioning with Ambiguity Resolution) para estabilizar e conseguir o mesmo nível de precisão do RTK. Mas ele tem a vantagem para quem precisa de mobilidade e não pode depender de uma estação base fixa.
Qual a diferença na prática?
Na prática, a escolha entre o RTK e PPP, depende da situação e dos requisitos de cada projeto, para assim analisar a tecnologia mais adequada para cada situação. E a diferença entre ambos decorre entre o momento em que eles corrigem os dados.
A essência do posicionamento GNSS de alta precisão é o processo de eliminação de erros. Os erros no posicionamento GNSS incluem erros de órbita e relógio do satélite, desvios do satélite, efeitos da ionosfera e troposfera na propagação do sinal e erros do receptor.
O RTK, recebe os dados de observação da estação base ou da estação virtual calculada pela rede CORS, assim sendo transmitidos à estação móvel por rádio, rede ou outros links de comunicação. Dessa forma, a precisão em nível centimétrico é alcançada ao eliminar os erros do satélite e o atraso na propagação do sinal através do cálculo de dupla diferença entre as observações da base e do rover.
O PPP, por sua vez, utiliza uma abordagem diferente para eliminar erros. Para os erros de órbita, relógio, viés e outros erros dos satélites, o dispositivo GNSS recebe diretamente os dados de correção (como órbita e relógio) transmitidos pelos satélites, e usa métodos como a estimativa de desvio de fase não calibrado (UPD - Uncalibrated Phase Delay) para resolver ambiguidades e obter resultados de alta precisão.
Portanto, com o avanço e a evolução da tecnologia de posicionamento de alta precisão em tempo real, tanto o RTK quanto o PPP são amplamente aplicados em setores diversos, como veículos autônomos, agricultura de precisão, drones, posicionamento marítimo e outras indústrias emergentes.


